Asenkron motor
İndüksiyon motor veya asenkron motor , rotordaki elektrik akımını üretmek için gerekli olan torku, duraç sargıların manyetik alanından elektromanyetik indüksiyon elde ederek üreten bir AC elekrik motordur. İndüksiyon motor bu nedenle genelde DC ve büyük senkron motorlarındaki gibi duraçtan rotora enerjinin tamamını ya da bir kısmını aktarmak için dış uyarım ya da öz uyarım yani mekanik komutasyon gerektirmez. İndüksiyon motor, bilezikli motor ve sincap kafes motor olmak üzere iki çeşit olabilir.

Üç fazlı sincapkafes indüksiyon motorları sağlam, güvenilir ve ekonomik oluşlarından dolayı genellikle endüstriyel sürücülerde kullanılırken tek fazlı indüksiyon motorları çoğunlukla ev cihazları gibi küçük yükler için kullanılır. Genellikle sabit devir hizmetinde kullanılmasına rağmen,indüksiyon motorların değişken frekanslı sürücülerle (VFDs) değişken hızlı hizmetlerde kullanımı artmaktadır. Değişken frekanslı sürücüler, değişken tork santrifüj fan, pompa ve kompresör yük uygulamalarında mevcut ve gelecekteki indüksiyon motorları için enerji tasarruf imkânı açısından özellikle önemlidir. Sincapkafesli indüksiyon motorlar genellikle hem sabit hızlı hem de değişken frekanslı sürücü (VFD) uygulamalarında kullanılır. Değişken voltaj ve değişken frekans sürücüleride değişken hız hizmetlerinde kullanılır.
.JPG.webp)
Tarihçe

1824'te, Fransız fizikçi François Arago döner manyetik alan varlığını formüle etti. El ile açılıp kapanan devirler Arago devirleri olarak isimlendirildi. 1879 yılında Walter Baily ilk ilkel asenkron motorunun etkilerini gösterdi. İlk alternatif akımlı kollektörsüz indüksiyon motorunu birbirlerinden bağımsız olarak icat eden Galileo Ferrais ve Nicola Tesla'nın, sırasıyla 1885 ve 1887'de motor modelleme çalışmaları ortaya kondu. 1887'nin Ekim ve Kasım aylarında, Tesla amerikan patent enstitüsüne başvurdu ve bu patentlerden bazıları mayıs 1888 de onaylandı. Nisan 1888'de, the Royal Academy of Science of Turin Ferrais'in alternatif akım fazlı motorların çalışması üzerindeki araştırmalarını detaylarıyla birlikte yayınladı. Tesla mayıs 1888'de, ilki dört kutuplu rotor formundaki kendi kendini yeniden başlatamayan relüktans motor, ikincisi bilezikli motor formundaki kendini başlatabilen relüktans motor ve üçüncüsü yabancı uyartımlı doğru akım kaynağıyla beslenen gerçek zamanlı sarma motor olmak üzere üç dört-stator-kutuplu motor çeşitini tanımlayan A New System for Alternating Current Motors and Transformers isimli teknik bildirgeyi Amerikan Elektrik Mühendisleri Enstitüsü'ne(AIEE) gönderdi. Tesla' patentlerine lisans verildiği dönemde alternatif akım güç sistemleri geliştiren George Westinghouse, asenkton motor kavramı üzerine bir patentini ve buna uygun sistemi geliştirmek üzere Tesla'yı danışman olarak bir yıllık işe aldı. Teslaya yardımcı olmak için atanan Westinghouse çalışanı C.F. Scott daha sonra indüksiyon motoru geliştirilmesini devraldı. Üç fazlı gelişime de kararlılığıyla, Michail Dolivo-Dobrovolsky1889 da kafes rotorlu indüksiyon motoru ve 1890 da üç bacaklı dönüştürücüyü icat etti. Fakat, ,iki fazlı pulsasyonları yüzünden Tesla'nın motorunun kullanışlı olmadığını iddia etti, ve üç fazlı çalışmalarına devam etmekte ısrar etti. Westinghouse 1892'de ilk kullanışlı indüksiyon motoru elde edip, 1893'te çok fazlı 60 hertz indüksiyon motorları için bir hat geliştirmesine rağmen, Westinghouse'un ilk motorları, B.G. Lamme dönen çubuklu rotor sargısını geliştirene dek bilezikli iki fazlı motorlardı. 1891'de General Electric Company üç-fazlı indüksiyon motorları geliştirmeye başladı. 1896 suretiyle, General Electric ve Westinghouse daha sonra sincap kafesli rotor olarak adlandırılan çubuk-sarma-rotor tasarımı için bir çapraz lisans anlaşması imzaladı. Arthur E. Kennelly, AC sorunların karmaşık sayı analizinde 90 derece döndürme operatörünü belirlemek için ''i''(kök içinde eksi bir) harfinin anlamını ilk kez açığa kavuşturan oldu. Charles Proteus Steinmetz artık daha çok indüksiyon motorun Steinmetz eşdeğer devresi olarak bilinen AC karmaşık büyüklüklerinin uygulanmasını büyük orandan geliştirdi. Günümüz bağlantı boyutları 1897'deki 7.5 beygirgücü motoruyla aynı olan 100-beygir gücü indüksiyon motor gibi buluş ve yeniklerle indüksiyon motorun gelişimi devam etti.
Çalışma prensipleri

Hem asenkron hem de senkron motorlarda, motor statorüne sağlanan AC güç, zaman içerisinde AC salınımlar ile dönen manyetik alan oluşur. senkron motorlarda rotor stator alan ile aynı oranda dönerken, asenkron motorlarda rotor, stator alandan daha yavaş hızda döner. Bu nedenle asenkron motor statoru manyetik alanı rotora göre değişir ya da döner. İkincil sarmal motor etkisinde, kısa devre ya da kapalı bir dış empedans olduğunda bu indükleme indüksiyon motorda ters bir akım oluşturur. Manyetik akı dönüşü rotor sarımlarında indüklenir, benzer biçimde transformatörün ikincil sargılarında da akım indüklenir. Rotor sarımlarındaki akımlar dolayısıyla stator alana karşı tepki rotorlarda manyetik alan oluşur. Lenz yasasına göre, oluşan manyetik alanın yönü rotor sarımlarıdan geçen akım değişimine karşıt şekilde olacaktır. Rotor sarımlarında indüklenen akımın nedeni stator manyetik alanın dönmesidir. Yani rotor sarmallarındaki akım değişimlerine karşı rotor döner stator manyetik alanın yönünde dönmeye başlayacaktır. İndüklenen rotor akım büyüklüğü ve tork uygulanan yükü dengeleninceye kadar rotor hız kazanır. Senkron hızda dönme rotor akımının indüklenmemesine neden olacağı için, asenkron motor hızı her zaman senkron motor hızından yavaştır. Gerçek ve senkron hız arasındaki fark ya da ''sekme'', Design B tork eğrili indüksiyon motorlarda yaklaşık %0.5 ile %5.0 arasında değişir. İndüksiyon makinelerde esas özellik ayrı olarak uyarılmış olmak yerine, senkron ya da DC makinelerinde veya sabit mıknatıslı motorlardaki gibi kendinden manyetize olarak yalnızca indüksiyon tarafından oluşmuş olmasıdır.
Rotor akımlarının indüklenmiş olması için, fiziksel rotor hızı stator döner manyetik alandan (n_s) daha düşük olmalıdır; aksi halde manyetik alan rotor iletkenlerine göre hareketli olmaz ve akımlar indüklenemez. Rotor hızının senkron hızının altına düşmesiyle manyetik alan dönme oranı sargılarda daha çok akım indüklenmesi ve daha fazla tork oluşumuyla rotorlarda artar. Rotorda indüklenmiş manyetik alan dönme oranı ile stator döner alanın dönme oranı arasındaki oran kayma olarak adlandırılır. Yük altında hız azalır ve yeterli tork oluşturmak için kayma artar. Bu nedenle, indüksiyon motor bazen asenkron motor olarak adlandırılır. Bir indüksiyon motor indüksiyon jeneratörü olarak kullanılabilir ya da doğrudan doğrusal hareket üretebilen linear asenkron motor oluşturabilinir.
Senkron hız
Bir AC motorun senkron hızı, , stator manyetik alanın dönüş devridir.

- ,

burada motor beslemesinin frekansıdır ve manyetik kutupların sayısıdır. [1][2] Bu da demektir ki, bir altı-kutuplu üç fazlı 120 ayrı üç kutup çifti ile kurulu motor için, 6 ya eşittir, bu nedenle 1,000 RPM (16.67 Hz) ve 1,200 RPM (20 Hz) 'ye eşittir, kaynak sistemler sırasıyla 50 Hz and 60 Hz dir. Asenkron motor asla senkron hızda dönmez. Böylece dönme hızı alt senkron hız ve asenkron motor olarak adlandırılır.[3]



Kayma
Kayma, , senkron hızı ve çalışma hızı arasındaki fark olarak tanımlanır , aynı frekansta rpm ya da yüzde senkron hız oranını gösterir. Bu nedenle,


burada stator elektrisel hızı, ise rotordaki mekanik hızı simgeler. Kayma, senkron hızda sıfırdan değişir ve 1 rotor durduğunda rotorun torkunu belirler. Kısa devre rotor sargıları küçük bir direnç olduğundan, küçük bir kayma rotorda büyük bir akım indükler ve büyük bir tork üretir.[4] Tam nominal yükte,kayma küçük ya da özel amaçlı motorlarda % 5'ten fazla değişmesine karşın büyük motorlar için bu değişim %1 den azdır.[5] Farklı büyüklükteki motorlar mekanik olarak bağlandığında bu hız değişimleri yük paylaşma sorunlarına neden olabilir. Kaymayı azaltmak için kullanılabilinecek çeşitli yöntemler vardır, VDFler ise genellikle en iyi çözümü sunar.[5][5]

Standart tork
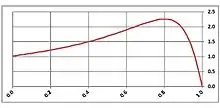
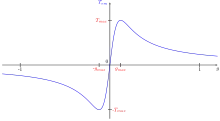
Standart NEMA Design B çok fazlı indüksiyon motoru için tipik hız- tork eğrisi sağda gösterilmiştir. Bu tür santrifüj popmpa ve fanlar düşük performans yükler için uygundur. Tasarım B motorları aşağıdaki tipik tork aralıkları tarafından kısıtlanır. [6][lower-alpha 1]
- Azami tork, 175-300 nominal tork yüzdesi
- Kilitli rotor torku ( 100% kayma da tork), 75-275 nominal tork yüzdesi
- Pull-up tork , 65-190 nominal tork yüzdesi
Motorun normal yük aralığında, torkunun eğimi yaklaşık olarak lineardir ya da kaymayla orantılıdır çünkü rotor direnç değerinin kaymayla bölümü linear şekilde torka baskındırYük nominal değerin üzerine çıkarken, stator ve rotor kaçak reaktans faktörleri kademeli olarak , , ilişkişinde belirgin hale geldikçe tork , nominal torka karşın yavaş yavaş kavislenir. Bozunum torkunun ötesinde yük torku artarken motor durur.

Başlangıç
Rekabet halinde küçük indüksiyon motorların üç temel çeşidi vardır. Bunlar, Tek-fazlı bölmeli- faz, gölge kutuplu motorlar ve çok fazlı indüksiyon motorlardır.
Fazlı motorlar bir etki olmadan kendinden başlayabilmelerine rağmen, pull-up tork tasarım sınırları gerçek yük koşulları aşmak için yeteri kadar yüksek olmalıdır.
İki kutuplu tek fazlı motorlarda, tork %100 kaymada(sıfır hızda) sıfıra gider, bu yüzden gölgeli kutuplar başlangıç torku sağlamak için değişiklikler gerektirir. Tek fazlı indüksiyon motor motora bir döner alan sağlamak için ayrı bir başlangıç devresini gerektirir. Böyle bir tek fazlı motor içinde normal çalışan sarmallar rotorun diğer yönde dönmesine neden olur, böylece başlangıç devresi çalışma yönünü belirler.
Belirli küçüklükte tek fazlı motorlarda, başlangıç bakır telin kutup parçası üzerinde dönüşü ile gölgeli kutup vasıtasıyla yapılır. Kaynak akımın gerisinde kalan dönüşle indüklenmiş akım, kutup yüzünün gölgeli parçası etrafında gecikmiş bir manyetik alan yaratır. Bu, motorun başlatmak için yeterli döner alan enerjisini verir. Bu motorlar genellikle büro fanı ve kayıt oynatıcı gibi, azalan motor fiyatlarıyla ve diğer AC motor tasarımlarla başlama methodu karşılaştırıldığında, düşük verimi tolere edilebilinir ve başlangıç tork gerekliliği düşük olan uygulamalarda kullanılır.
Büyük tek fazlı motorlar bölmeli fazlı motorlardır ve dış faz akımıyla beslenen bir ikinci stator sarmalına sahiptir; bu tür akımlar bir sarma besleme vasıtasıyla bir kondansatör veya endüktanstan aldığı farklı değerler ve ana sarmaldan gelen direnç ile oluşabilir. Kapasitör başlatmalı tasarımlarda, ikinci sarma motor hızı tamamlanan kadar kesilir, genellikle santrifüj anahtarının ağırlığa etkimesiyle ya da termistörün ısınması ve yükselen direnç, ya da ikincil sarmal üzerideki akımın önemsiz bir seviyeye azaltılması. ile gerçeleşir. Kapasitör yürütmeli dizaynlarda ise yürütmede ikincil sarmal torku geliştirmek için korunur. Direnç başlatmalı tasarımlarda, başlatıcı , reakstansı oluştururken başlangıç sarmallarına seridir.
Kendinden başlatmalı çok fazlı indüksiyon motorları durma anında bile tork üretirler. Mevcut kafes asenkron motor başlatma metodları doğrudan on-line başlatma, azaltılmış gerilim reaktörü, otomatik tansformatör başlatma, yıldız-üçgen başlatma, yeni yumuşak katı hal düzenekleri ve VDFleri içerir. [7]
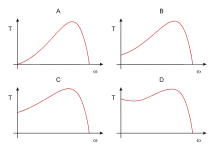
Çok fazlı motorlarda farklı hız tork karakteristiklerini şekillendirmek için rotor çubukları vardır. Rotor çubukları içinde akım dağılımı indüklenmiş akımın frekansına bağlı olarak değişir. Dururken, rotor akımı stator akımı ile aynı frekans ve (kabuk etkisi ile) kafes rotor çubuklarının dış kısımlarında seyahat etmek eğilimindedir. Farklı çubuk şekilleri hız-tork karakteristiklerinin yanı sıra başlatmada demeraj akımının kontrolüne olanak verebilir.
Sarılı rotorlu motorlarda, hızlandırma kontrolü ve hız kontrollü amaçlı olarak dış dirençler hız-tork katrakteristiklerindeki değişimlere olanak sağlamak için rotor devresi kayma halkaları ile bağlantılıdır.
Hız Kontrolü
Yarı iletken güç elektroniği gelişmeden önce, frekans değiştirmek zordu ve kafes indüksiyon motorları genellikle sabit hızlı uygulamalarda kullanılırdı. Rotor devresi için kayma halkaları veya hız kontrolünün önemli aralığını sağlayan değişken dış dirence bağlı sarılmış rotorlu motorlar (WRIM (wound rotor motor)) ya da DC sürücüler elektrikli gezer köprülü vinçlerin uygulamalarında kullanılır. Ancak, RIMin düşük hızda çalışması ile ilişkili direnç kayıpları özellikle düşük yükler için maliyet açısından önemli bir dezavantajdır. [8] Büyük kayma halkası motor sürücüleri olarak adlandırılan kayma enerji geri kazanım sistemleri, rotor devresinden enerji kurtarmak, düzeltmek ve VFD kullanarak güç sistemine geri döndürmek için bazen hala kullanılır. Birçok endüstriyel değişken hız uygulamasında, DC ve WRIM sürücüler VFD beslenen kafesli asenkron motorlar tarafından yerinden ediliyor. Yüklerin asenkron motor hızını kontrol etmek için en yaygın ve etkili yol VDF dir. VFD nin benimsenmesinde önündeki engeller maliyet ve güvenilirlik faktörlere bağlı olarak son üç yılda önemli ölçüde azaltılmıştır.Bunun sonucunda bu sürücü teknolojisinin tüm yeni takılan motorların %30-40ı kadarında benimsenmesi öngörülüyor.[9]
Yapı
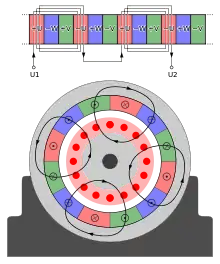
Bir indüksiyon motor statoru manyetik alan oluşturmak için nufüz eden besleme akımı taşıyan kutuplardan oluşur. Manyetik alan dağılımını optimize etmek için, sargılar stator çevresindeki yuvalara dağıtılır. Burada manyetik alan aynı sayıda kuzey ve güney kutuplara sahiptir. Indüksiyon motorları en yaygın tek fazlı veya üç fazlı güçle çalıştırılır, ancak iki-fazlı da motorlar vardır; teoride, asenkron motorlar fazları herhangi bir sayı olabilir. Çok sayıda iki sarımlı tek fazlı motorlar iki fazlı motor olarak incelenebilir. Bu nedenle kapasitör ikinci bir güc faz tek fazlı güç kaynağından 90 derece oluşturmak için kullanılır ve ikinci motor sarımını besler. Tek fazlı motorlar başlangıçta bir döner alan üretmek için bazı mekanizmalar gerektirir. Kafesli asenkron motor rotor iletken çubuklar genellikle gürültüyü azaltmak için eğridir.
Ters döndürme
Bir indüksiyon motorun dönüş yönünü değiştirme yöntemi üç fazlı veya tek fazlı bir makine olup olmamasına göre değişir. Bu durumda üç fazlı için, ters döndürme herhangi iki fazın iletken bağlantısı değiştirilerek yürütülmektedir. Bir tek fazlı bölünmüş fazlı motorda, bu başlangıç devresi ve birincil sarmal arasındaki bağlantı ile elde edilir. Tek fazlı bölünmüş fazlı motorlar birincil sarmalı ve içten bağlantılı başlangıç devresi birbiriyle bağlantılı uygulamalar için tasarlanmıştır. Böylece rotasyon değiştirilemez. Ayrıca, tek fazlı gölgeli kutuplu motorlar sabit rotasyona sahiptir ve yönleri değiştirilemez.
Güç faktörü
Bu güç faktörü indüksiyon motorlarda yük ile değişir, genel olarak bu 0.85 iken tam yüklü konumda 0.90, stator ve rotor kaçak ve mıknatıslanma reaktansları nedeniyle yüksüzden düşük yüklü konuma kadar 0.12 dir.[10] Güç faktörü bağlanan kapasitörler yoluyla tek motor bazında veya, tercihen, ortak bir veri yolu üzerindeki birkaç motorları içeren şekilde geliştirilebilir. Ekonomik ve diğer hususlar için, güç sistemleri nadiren güç kuvvetler birliğini doğrulayan güç faktörleridir. [11] Kapasitörler, transformatör ve devre reaktansları arasındaki harmonik rezonans önlemek için güç kondansatör uygulaması ile harmonik akım, güç sistem analizi gerektirir. [12] Rezonans riskini en aza indirmek ve güç sistem analizini basitleştirmek için ortak veriyolu güç faktörü düzeltmesi tavsiye edilir.[12]
Verimlilik
(Ayrıca bakınız Energy savings)
Tam yük motor verimiyaklaşık %85 ile %97 arasında değişir, kabaca motor kayıplarıyla ilgili bozunumlar aşağıdaki gibidir:
- Sürtünme ve rüzgarlama,% 5 -% 15
- Demir veya nüve kayıpları,% 15 -% 25
- Stator kayıpları,% 25 -% 40
- Rotor kayıpları,% 15 -% 25
- Kaçak yük kayıpları,% 10 -% 20.
Birçok ülkede farklı düzenleyici kurumlar yüksek verimli elektrik motor kullanımına teşvik etmek için kanunlar düzenleyip uyguladı. Mevcut ve gelecek yasamalar premium verimli indüksiyon tipi motorların tanımlanan cihazlarda kullanılmasını zorunlu kıldı. Daha fazla bilgi için, bkz: Enerji tasarruflu motorlarda bakır ve Premium verimlilik
Steinmetz eşdeğer devresi
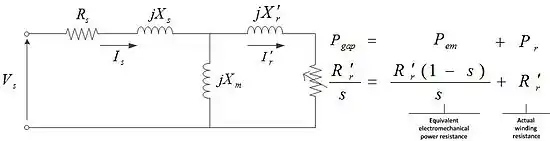
Birçok kullanışlı zaman,akım voltaj,hız,güç faktörü ve tork ile motor arasındaki ilikşilendirme Steinmetz (ayrıca T-eşdeğer devresi olarak ya da IEEE önerilen eşdeğer denklemi olarak adlandırılan) eşdeğer devresinden yapılanmıştır.Aynı zamanda, indüksiyon motorlarda elektrik girişi nasıl mekanik enerji çıkışına dönüşür sorusunu cevaplamada matematiksel bir model olarak kullanılmıştır. Eşdeğer devre çok fazlı indüksiyon motorların tek fazlı gösterimlerinde kararlı-hal dengeli-yük koşullarında geçerlidir. .
Steinmetz eşdeğer devre basitçe aşağıdaki bileşenleri bakımından ifade edilir:
- Stator direnç and kaçak reaktans (, ).
- Rotor direnç, kaçak reaktans, ve kayma (, or , , ve ).
- Magnetizan reaktans ().







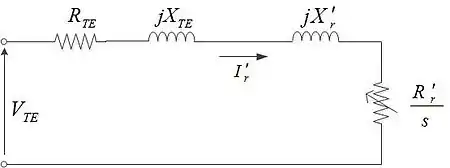
Alger in Knowlton'un yeniden yorumlamasına göre, bir indüksiyon motor basitçe manyetik devresi stator sarmalı ve hareketli rotor sarmalı hava boşluğuyla ayrılmış bir elektrik transformatörüdür. Buna göre eşdeğer devre, ideal bir transformatör ile ayrılmış sargılar eşdeğer devre elemanlarıyla gösterildiği gibi aşağıdaki devrede, devreyle bağlantılı denklem ve parametre tanımlarının bulunduğu tablo ile de gösterilir. [7][11][13][14][15][16]
| Devre Parametre Tanımları | ||
|---|---|---|
| Birimler | ||
| stator senkron frekansı | Hz | |
| dakikadaki devir rotor hızı | rpm | |
| dakikadaki devir senkron hızı | rpm | |
| stator ya da birincil akım | A | |
| rotor ya da ikincil akım | A | |
| mıknatıslanma akımı | A | |
| karmaşık sayı, ya da 90° döndürme , operatör | ||
| Thévenin reaktans faktörü | ||
| motor faz sayısı | ||
| motor kutup sayısı | ||
| elekromekanikal güç | W or hp | |
| hava boşluğu gücü | W | |
| rotor bakır kayıpları | W | |
| giriş gücü | W | |
| çekirdek kaybı | W | |
| sürtünme ve rüzgarlama kaybı | W | |
| çalışan ışık watt giriş |
W | |
| kaçak yük kaybı | W | |
| stator yani birincil direnç ve kaçak reaktans | Ω | |
| rotor ya da ikincil direnci & stator tarafında belirtilen kaçak reaktans | Ω | |
| direnç & motor girişindeki kaçak reaktans | Ω | |
| Thévenin direnç eşitliği & kaçak reaktans birleşimi, and | Ω | |
| kayma (sekme) | ||
| elektromanyetik tork | Nm or ft.-lb. | |
| nominal tork | Nm or ft.-lb. | |
| etkilenmiş stator faz voltajı | V | |
| mıknatıslanma reaktansı | Ω | |
| Ω | ||
| stator veya birincil empedansı | Ω | |
| rotor ya da ikincil empedansı birincilde adlandırılan | Ω | |
| motor statoru empedansı ya da birincil giriş | Ω | |
| rotor birleşimi ya da ikincil ve manyetize empedans | Ω | |
| Thévenin eşitliği devrem empedansı, | Ω | |
| rotor hızı | rad/s | |
| senkron hızı | rad/s | |
| mho | ||
| Ω | ||





































Aşağıdaki başparmak kuralı yaklaşımların devrede uygulanışı bulunmaktadır:[16][17][18]
- Maksimum akım olur altında kilitli rotor akımı (LRC) Koşulları ve biraz daha az , LRC genellikle arasında değişen 6 ve 7 kez anma akımı için standart uygulama B motorlar.[6]
- Arıza tork olduğunda ve böyle olduğunu ve bu nedenle, sabit voltaj girişi, düşük kayma asenkron motorun yüzde oranlı maksimum tork yaklaşık yarım yüzde puan LRC.
- Akraba statör rotor kaçak tepki standart Tasarım B kafes asenkron motorlar vardır[15]




- .

- İhmal statör direnci,bir asenkron motorun tork eğrisini Kloss denklemine göre azaltır.[19]
- burada , anındaki kaymadır.


| Temel Elekriksel Denklikler | ||
|---|---|---|
Stator akım
| ||




| Güç Denklikleri | ||
|---|---|---|
Steinmetz devre denkliğinden ,
Rotor hızı açısından elektromekanik güç çıkışını ifade eden
ft.-lb olarak ifade edilir .:
| ||









| Torque Equations | ||
|---|---|---|
 IEEE tarafından önerilen Thévenin denklik devresi olduğunda ve , ve
Foot-pound biriminde;
| ||


















Lineer indüksiyon motor
Linear indüksiyon motorlar, döner indüksiyon motorlarda olduğu gibi genel prensiple çalışırlar, genellikle üç fazlıdırlar ve doğrusal hareket üretmek için tasarlanmıştır. Manyetik kaldırma, doğrusal itme gücü, doğrusal aktüatörler ve sıvı pompalamaları kullanıldığı alanlardandır.
Kaynakça
- Genel
- Bailey, Benjamin Franklin (1911). The Induction Motor. McGraw-Hill.
- Behrend, Bernhard Arthur (1901). The Induction Motor: A Short Treatise on its Theory and Design, With Numerous Experimental Data and Diagrams. McGraw Publishing Company / Electrical World and Engineer.
- Boy de la Tour, Henri (1906). The Induction Motor: Its Theory and Design, Set Forth By a Practical Method of Calculation. Translated Cyprien Odilon Mailloux. McGraw Pub. Co.
- Atıflar
- Electric Motors Reference Center by Machine Design magazine.
- "Motor Formulas" 8 Mayıs 1999 tarihinde Wayback Machine sitesinde arşivlendi.. elec-toolbox.com.
- Slip in Asynchronous Motor - www.electricaldeck.com
- Herman, Stephen L. (2011).
- Peltola, Mauri.
- NEMA MG-1 2007 Condensed (2008).
- Liang, Xiaodong; Ilochonwu, Obinna (Jan 2011).
- Jamil Asghar, M.S. (2003).
- Lendenmann, Heinz; et al.
- Fink, D.G.; Beaty, H.W. (1978).
- Jordan, Howard E. (1994).
- NEMA MG-1, p. 19
- Hubert, Charles I. (2002).
- Beaty, H. Wayne (Ed.) (2006).
- Knight, Andy.
- IEEE 112 (2004).
- Alger (1949), p. 711
- Özyurt, Ç.
- Hameyer, Kay (2001).
Dış bağlantılar
- Bir indüksiyon motoru çizim25 Ekim 2007 tarihinde Wayback Machine sitesinde arşivlendi.
- Dönen manyetik alanlar25 Temmuz 2010 tarihinde Wayback Machine sitesinde arşivlendi.: interaktif, (İtalyan)
- Sincap kafesli endüksiyon motoru kurumu kullanarak povray
- Asenkron motor la alakalı konular arasında Hyperphysics web sitesi (C. R. NEF, GSÜ Fizik ve Astronomi Bölümü tarafından)

{kind=link}
{kind=link}