PID
PID (İngilizce: Proportional Integral Derivative) oransal-integral-türevsel denetleyici kontrol döngüsü yöntemi, endüstriyel kontrol sistemlerinde yaygın olarak kullanılan bir geri besleme denetleyicisi yöntemidir.[1] Bir PID denetleyici sürekli olarak bir hata değerini, yani amaçlanan sistem durumu ile mevcut sistem durumu arasındaki farkı hesaplar. Denetleyici süreç kontrol girdisini ayarlayarak hatayı en aza indirmeye çalışır.[2]
Geçmişte istatistik değerleri olmayan bir sürecin ve bilginin olmadığı durumlarda, PID denetleyici algoritması tarihsel olarak en iyi denetleyici olarak kabul edilmiştir. PID kontrol algoritması üç parametre ile , özel proseslerin gereksinimleri için kontrol eylemi sağlayabilir. Denetleyicinin tepkisi hatanın denetlenerek yanıtlanması olarak tarif edilebilir.
Bazı uygulamalarda, uygun bir sistem kontrolü sağlamak için sadece bir veya iki işlem kullanmak gerekebilir. Bu, diğer parametrelere sıfır değeri vererek elde edilebilir. Bu durumda PID, ilgili denetim eylemlerinin yokluğuna göre PI, PD, P veya I olarak tanımlanir. Türevsel eylem, ölçüm gürültüsüne maruz kaldığından PI kontrolörleri daha yaygındır.[2] Bir Integral öğesinin olmaması kontrol hareketi nedeniyle sistemin istenilen değere ulaşmasını engelleyebilir.
Temel işlevi
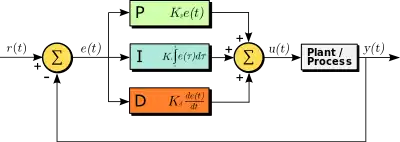
PID algoritması hata değerini azaltmak için üç ayrı sabit parametreyi kontrol eder, bu sebeple bazen üç aşamalı kontrol olarak adlandırılır: oransal, P ile gösterilir; integral I ile gösterilir; türev değerleri, D ile gösterilir.[1] Sezgisel olarak, bu değerler mevcut değişim göz önüne alınarak zaman açısından şu şekilde yorumlanabilir; P mevcut hataya bağlıdır, I geçmiş hataların toplamı ve D gelecekteki hataların bir tahminidir. Bu üç eylemin ağırlıklı toplamı yoluyla kontrol edilen süreç istenilen seviyeye ayarlamak için kullanılır. Böylece örnek olarak bir kontrol valfının pozisyonu ya da bir ısıtma elemanı çıkış gücü kontrol edilerek istenilen akış veya sıcaklık seviyesi en en düşük hata ile elde edilmeye çalışılır.
Yandaki blok şeması bu parametrelerin nasıl hesaplandığını ve uygulandığını göstermektedir. Şemada görüldüğü gibi PID denetleyici sürekli olarak bir hata değerini hesaplamaktadır. amaçlanan durum ile ölçülen durum arasındaki farktır. Denetleyici oransal, integral, ve türevsel terimleri içeren bir düzeltme uygular. Bu düzeltme, bir kontrol değişkenini ayarlayarak hatayı en aza indirgemeyi amaçlar. Örneğin, düzeltme bir kontrol valfinin PID terimlerinin ağırlıklı toplamına ayarlanması olabilir.




Kaynakça
- "PID Theory Explained". NI White Papers. National Instruments. 29 Mart 2011. 16 Ağustos 2017 tarihinde kaynağından arşivlendi. Erişim tarihi: 6 Şubat 2018.
- Jim Hogenson. "PID for Dummies". Control Solutions Minnesota. Control Solutions, Inc. 22 Aralık 2017 tarihinde kaynağından arşivlendi. Erişim tarihi: 6 Şubat 2018.
